
 上一版
上一版
通用原子航空系统公司披露 “小精灵”发射/回收概念

拖放系统可能基于梅吉特防务系统公司类似的航空拖曳靶标吊舱(美国梅吉特防务系统公司图片)

第一个方案是通过连接线缆的飞行平台完成发射和回收(美国通用原子航空系统公司图片)
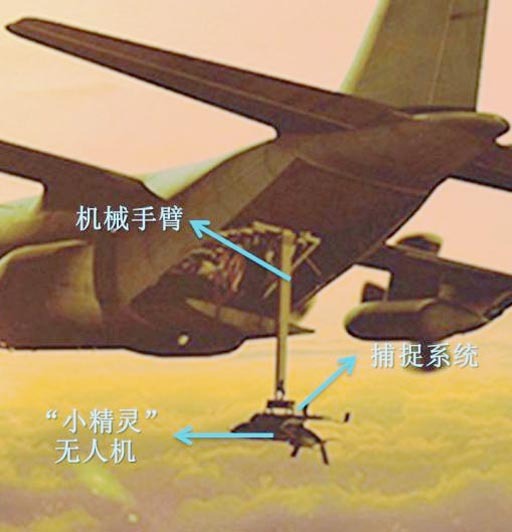
第二个方案是机械手臂和捕捉系统(美国通用原子航空系统公司图片)
袁成
8月22日,美国《航空周刊与空间技术》网站发布消息称,2017年3月,美国通用原子航空系统公司(GA-ASI)和Dynetics公司分别获得了美国防部国防预先研究计划局(DARPA)“小精灵”项目第2阶段合同,进一步优化平台设计,并对安装在C-130运输机上的回收系统开展风险降低飞行试验(验证安全性和性能),以达到初步设计评审(PDR)的要求。
按照“小精灵”项目设想,有人或无人固定翼飞机将在敌防区外投放携带各种模块化载荷(光电红外、信号情报或干扰机)的低成本无人机集群,并以分布式协同方式遂行作战任务。任务完成后,“小精灵”集群将与C-130运输机汇合,在空中完成回收作业,为下次任务做好准备。无人机配装了低成本涡喷发动机,寿命为飞行20次左右。
目前来看,虽然包括通用原子在内的很多公司都拥有空中发射飞行器的经验,但在空中回收有动力、向前飞行的无人机仍是技术空白。公司主席大卫·亚历山大(David |Alexander)认为:“我们可不想每次发射都损失100万美元(巡航导弹大小的无人机单架成本为75~100万美元左右),但回收的确是最难的一步。如果能够实现,便可在无人机上集成一些高性能传感器,从中获取有用的数据,并在空中进行回收。这样才具备真实的作战能力。”
尽管实现起来困难重重,但通用原子于2017年8月披露了空中发射回收小型无人机的两种方案细节:一种基于改进的拖曳靶标卷式拖放系统,另一种使用机械手臂回收无人机。
拖曳靶标卷式拖放系统
目前通用原子公司正在对现有的“航空拖曳靶标卷式拖放机-发射系统”进行相关小幅改进。亚历山大说:“目前拖曳式靶标有标准的技术,通过粗线缆放出靶标,然后再把它们拖回来。目前‘小精灵’项目也打算采用这种概念,但与靶标连接在线缆末端不同,我们需要通过相关机构捕捉无人机。”
方案的具体内容是把“小精灵”无人机安装在附有飞行发射回收平台的卷式拖放机上。作战时无人机和飞行平台相连并一起放出,之后释放无人机。回收时无人机与飞行平台重新连接,并一起被回收。
尽管通用原子目前没有官方披露特定的供应商或合作伙伴,但一个潜在的公司即梅吉特防务系统公司,后者可提供一系列拖曳靶标拖放机,包括许多航炮打靶用靶标系统,以及一套RM-62双轨卷式施放机(半自动、冲压空气、涡轮驱动设备)。
机械手臂
第二种回收方案是在C-130尾门处安装拥有夹具的可活动的机械手臂。亚历山大表示:“机械手臂在空中抓住无人机,并把它放入机身内。这种方案存在一些困难,因为小型无人机正好处于C-130的尾流场中,那里的湍流程度相当剧烈。”
最后亚历山大表示,虽然两种方案都存在风险,但都是项目的前进方向。2018年年初,DARPA将选择一家承包商进入为期18个月的项目第三阶段,进行原型机制造和试验,2019年下半年将开展“小精灵”无人机集群的空中发射和回收验证。